


テックメディアTech media
バイオメカニクスにおけるモーションキャプチャの利用
2017.04.13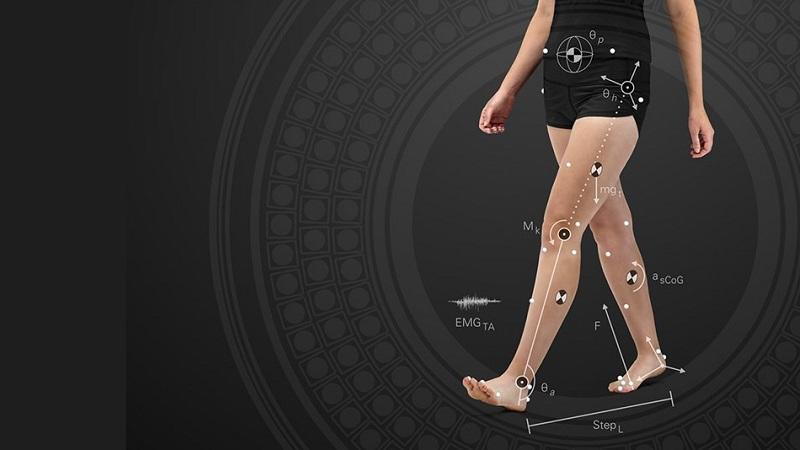
モーションキャプチャによる姿勢表現
モーションキャプチャが直接計測する情報は、計測点(マーカー)の3次元位置です。身体の各部分(例:前腕、大腿)ように、剛体(変形しない物体)と見なした物体の運動計測では、さらに姿勢などを算出することがあります。剛体と定義し3次元空間でその姿勢を算出する際には、1つの剛体に対して最低3個のマーカーが貼付されている必要があります。姿勢は3×3の回転行列で表現することができます。この回転行列をつくるためには、各剛体に固定された直交座標系を考え、絶対座標系から見たその各座標軸の単位ベクトル(基底)を並べれば直交行列(回転行列)となります。このうち2つの単位ベクトルがわかれば、残りの単位ベクトルは既知の2つの単位ベクトルから計算することができますので、3つのマーカーがあれば、これらの直交座標系を構成できます。すなわち原理的には3つのマーカーがあれば、各剛体の直交行列が計算でき、姿勢を表現できます。
動力学計算
運動学は幾何学的な問題を扱うのに対して、動力学計算では運動方程式(二階の微分方程式)を介した計算を行います。現在の状態(角度、角速度)と入力である力(関節トルクや筋力)を与えて、発生する角速度を与えるのが順動力学計算です。順動力学計算では、シミュレーション等によって、運動を予測する事ができます。一方、モーションキャプチャ等から得られた位置情報と質量や慣性モーメント等のパラメータと併せて、力やトルク等を推定する計算を逆動力学計算と言います。この動力学計算では、加速度や角加速度などの情報が必要となるため、モーションキャプチャを使った動力学計算では位置情報から加速度や角加速度まで計算をする必要があります。
逆動力学計算の詳細は、「モーションキャプチャと逆動力学解析」をご参照ください。
外部計測機器との同期
動力学計算ではしばしば床反力など、身体などに作用する外力を必要とします。それらの外力は床反力計(フォースプレート)や力覚センサを利用しますが、それらと同期して計測することが必要です。
OptiTrackでは、システムの同期に同期用ユニットeSync2を利用します。さらにMotive 1.10より外部機器との同期にナショナルインスツルメント(NI)社のDAQシステムを利用して同期計測ができるようになりました。フォースプレートに関しては、Motive 1.9よりAMTI社、Motive 1.10よりベルテック社のフォースプレートをサポートしています。
テックメディア 検索
お問い合わせInquiry
お客様の課題に合わせてスタッフが最適な解決します。
製品の修理や故障、技術的なお問い合わせはサポートからお問い合わせください。